
Pesquisador do ACSO ministra palestra internacional sobre transferência da Inteligência Artificial dos simuladores para o mundo real
Notícia 115:
Na última quinta-feira, 28 de abril, o prof. Marco Simões, pesquisador do ACSO, ministrou uma palestra no RoboCup Humanoid League Virtual Season Workshop. O prof. Marco foi o palestrante convidado responsável pela palestra de abertura do Workshop que celebrou o término da temporada 2021 da competição virtual de robôs humanoides da liga RoboCup Humanoid. Além da palestra principal, o Workshop contou com uma mesa de discussões sobre a transferência do conhecimento da simulação para os ambientes reais e sessões técnicas das equipes participantes da competição virtual.
O prof. Marco é líder da equipe de competições científicas da Uneb, BahiaRT, e membro do comitê executivo da liga RoboCup Soccer Simulation', responsável pela realização das competições mundiais de futebol de robôs simulados. Os comitês da RoboCup Federation são compostos por pesquisadores voluntários convidados em função da relevância das suas contribuições científicas para a comunidade.
Prof. Marco Simões explicou os requisitos para aproximar a simulação de robôs humanoides dos robôs reais.
A palestra aconteceu remotamente e está disponível no YouTube. Logo após a sessão de perguntas e respostas da palestra, seguiu-se uma mesa redonda com diversos integrantes da comunidade RoboCup, incluindo pesquisadores e estudantes, para debater estratégias para tornar viável a transferência de conhecimento dos experimentos de inteligência artificial em simuladores para os ambientes reais, de forma direta e efetiva.
Simulação x Mundo Real
Um dos desafios científicos para a Robótica Inteligente - e para os Sistemas Inteligentes em geral - é transferir os resultados obtidos pela Aprendizagem de Máquina nos experimentos simulados para os ambientes reais onde os artefatos inteligentes precisam atuar. Em geral, os simuladores apresentam sempre um erro não desprezível em relação à realidade, especialmente no contexto de artefatos inteligentes que atuam considerando intevalos de tempo na faixa dos milisegundos ou menos.
A RoboCup Federation organiza a estratégia para solucionar um dos desafios do século para a IA - o futebol de robôs autônomos - divindo-o em diversas ligas com objetivos distintos e coplementares. A liga de Simulação, é uma das mais antigas e projeta como será a Inteligência Artificial coletiva destes robôs quando eles possuirem habilidades físicas iguais ou superiores aos seres humanos. Nesta liga surgiu a competição Futebol de Robôs Simulados 2D. Nesta competição os movimentos como corrida e chute são considerados como se fossem perfeitos e apenas a Inteligência Artificial e a cooperação são o foco da pesquisa.
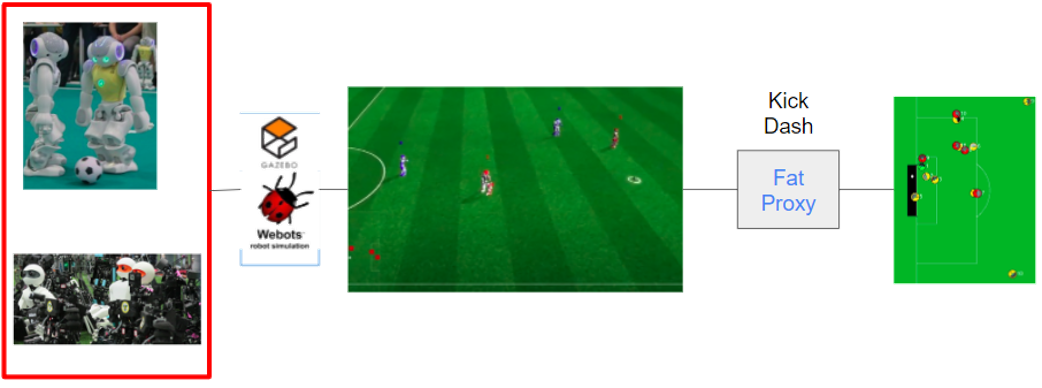
O Desafio de Futebol de Robôs Simulados 3D representa uma ponte entre a Simulação e o Mundo Real.
De outro lado, a liga de robôs humanoides busca construir robôs que tenham habilidades boas o suficiente para jogar futebol. Enquanto a simulação trata dos robôs do futuro, a liga humanoide busca evoluir a tecnologia atual em direção a este futuro. No intuito de aproximar mais rapidamente estes dois mundos, foi criada a competição de robôs simulados 3D que visa aproximar o mundo dos robôs com habilidades perfeitas dos robôs reais que existem na atualidade.
A Uneb é uma das instituições de referência no desafio de robôs simulados 3D participando tanto da organização dos eventos mundiais e nacionais quanto das competições, sendo a maior vencedora da competição brasileira (eneacampeã), além de figurar entre as 4 melhores universidades do mundo neste desafio em pelo menos cinco anos na última década.