
Noticia091
Notícia 091:
ACSO tem dois artigos aceitos no maior Simpósio de Robótica da América Latina
O ACSO acaba de ser notificado da aceitação dos dois artigos que submeteu ao 15th Latin American Robotics Symposium/6th Simpósio Brasileiro de Robótica - LARS-SBR 2018. O evento acontecerá de 6 a 10 de novembro em João Pessoa-PB. Os anais serão publicados e indexados na base de conhecimento científico IEEE Xplore e os melhores trabalhos serão selecionados durante o evento para submeter uma versão estendida ao conceituado Journal of Intelligent & Robotic Systems da Springer.
O LARS-SBR acontece como parte do Robotica - maior evento da área na América Latina - juntamente com as Competições Brasileira e Latinoamericana de Robótica - LARC-CBR em que o ACSO também estará representado com sua equipe de competições científicas BahiaRT.
Este ano o evento teve um acréscimo de 50% no número de submissões tornando ainda mais disputado o processo de aceitação dos trabalhos. Pelo segundo ano consecutivo, o ACSO tem trabalhos aceitos para este evento numa inequívoca evidência da melhoria contínua do processo de pesquisa científica no âmbito deste núcleo de pesquisa.
Os trabalhos aceitos foram os seguintes:
- SIMÕES, Marco A. C. e NOGUEIRA, Tatiane. Towards Setplays Learning in a Multiagent Robotic Soccer Team
- SILVA, Robson, SIMÕES, Marco A. C., CAMPOS, Jorge e SOUZA, Josemar. Framework for modeling autonomous multi-robots systems
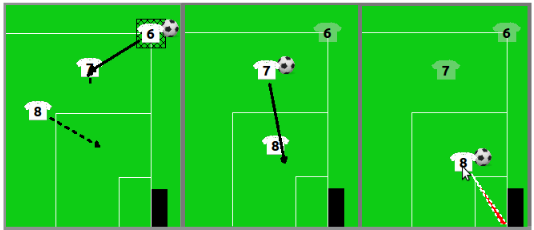
Um dos trabalhos apresenta uma proposta inovadora para aprendizado e comportamento cooperativo em um time de robôs.
O primeiro trabalho apresenta uma proposta de um dos projetos em andamento no ACSO para o aprendizado de comportamento cooperativo em sistemas multiagentes robóticos a partir do conhecimento de especialistas humanos. A abordagem será validada usando o framework de testes RoboCup 3D Soccer Simulation com a equipe de futebol de robôs do ACSO. Nesta validação os robôs deverão aprender a cooperar para realizar jogadas coletivas a partir do conhecimento do especialista humano no domínio do problema. Nesta proposta, a aprendizagem de máquina supervisionada e não supervisionada bem como métodos de tratamento de conhecimento incerto ou impreciso serão utilizados.
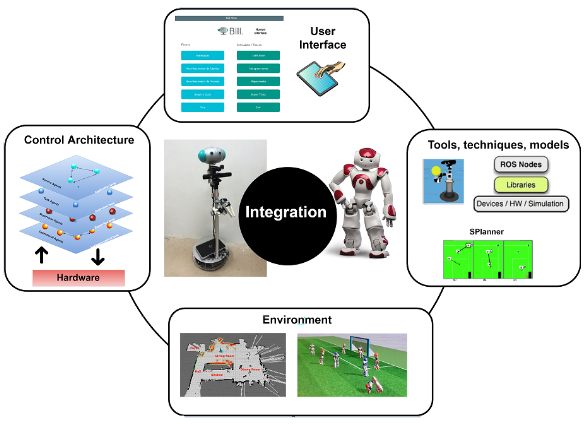
O segundo trabalho apresenta um framework para integrar o desenvolvimento inteligente em robôs heterogêneos com base em redes de Petri.
O segundo trabalho apresenta um framework baseado em Redes de Petri e técnicas de sistemas multiagentes para gerenciar as tarefas de integração entre robôs e seu ambiente, sincronização de movimentos e cooperação com outros agentes robóticos ou humanos. A abordagem baseia-se numa visão integrada em que múltiplos robôs com características diferentes conviverão juntamente com agentes humanos de forma coordenada.